ويلڊنگ روبوٽ سيريز



ويلڊنگ روبوٽ

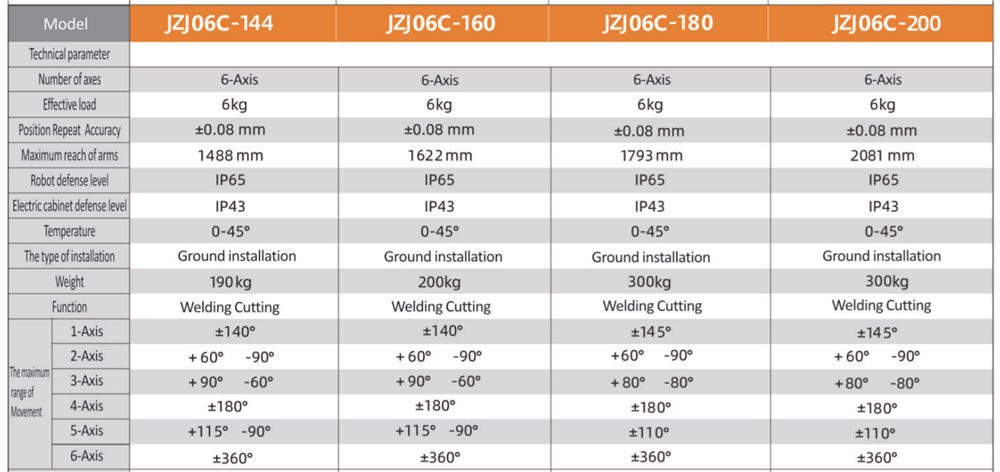
ويلڊنگ روبوٽ سيريز JZJ06C-180
ويلڊنگ روبوٽ سيريز JZJ06C-144

ويلڊنگ روبوٽ سيريز JZJ06C-160

ويلڊنگ روبوٽ سيريز JZJ06C-200
مختصر تعارف
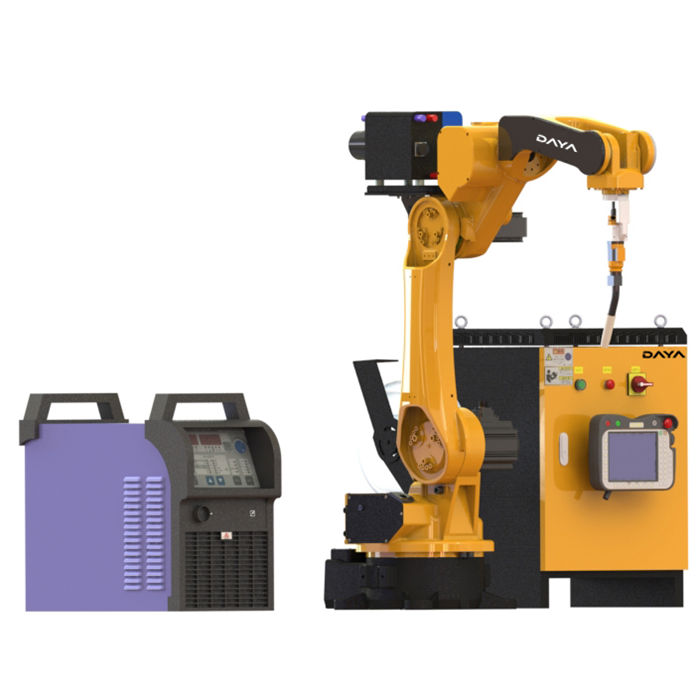
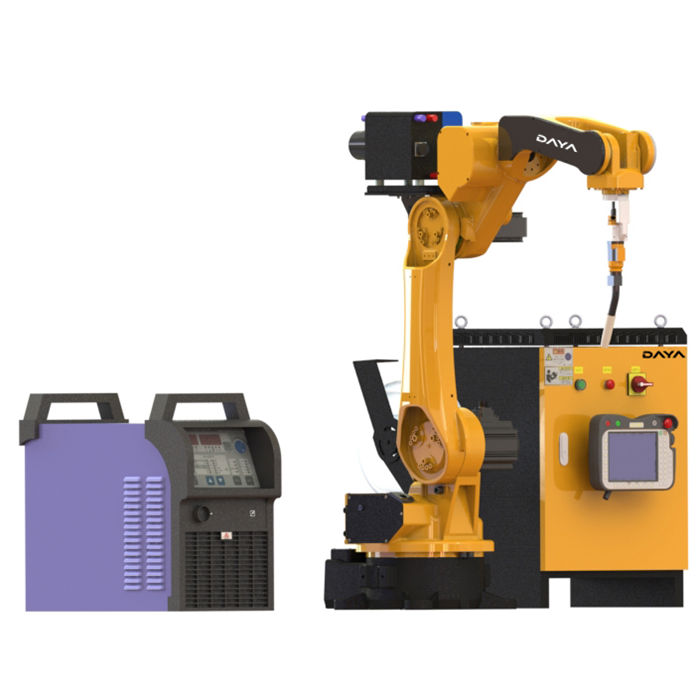
ويلڊنگ روبوٽ هڪ صنعتي روبوٽ آهي جيڪو ويلڊنگ ۾ مصروف آهي (ڪٽڻ ۽ اسپري ڪرڻ سميت). بين الاقوامي تنظيم فار اسٽینڈرڈائيزيشن (ISO) جي تعريف موجب ، صنعتي روبوٽ معياري ويلڊنگ روبوٽ سان تعلق رکي ٿو ، صنعتي روبوٽ هڪ گھڻائي ، رپيٽبل پروگراميبل ميري ٽولي ٽي يا وڌيڪ پروگراميل محور سان هوندو آهي ، جيڪي صنعتي آٽوميشن جي ميدان ۾ استعمال ٿيندا آهن مختلف ايپليڪيشنن کي ترتيب ڏيڻ جي لاءِ ، روبوٽ جي آخري محور جو ميخانياتي interfaceانچو عام طور تي هڪ ڳن flيل فلانج آهي ، جيڪو مختلف ٽولز يا آخري اثرن سان ڳن canجي سگھي ٿو. ويلڊنگ روبوٽ صنعتي روبوٽ جي اينڊ شافٽ فلينج تي ويلڊنگ ٽنگز يا ويلڊنگ (ڪٽڻ) بندوق انسٽال ڪرڻ آهي ، ته جيئن اهو ويلڊنگ ، ڪٽڻ يا حرارتي ingاريندڙ سامان کڻي سگهي.
روبوٽ ويلڊنگ ميزيڪل پروگرام ڪيل اوزار (روبوٽس) جو استعمال آهي ، جيڪي مڪمل طور تي ويلڊنگ عمل کي ويلڊ ڪرڻ ۽ حصو سنڀالڻ سان هڪ ويلڊنگ عمل کي مڪمل ڪري رهيا آهن. پروسيس جهڙوڪ گئس دات آرڪ ويلڊنگ ، جيتوڻيڪ اڪثر پاڻمرادو هوندا آهن ، لازمي طور تي روبوٽ ويلڊنگ جي برابر نه هوندا آهن ، ڇاڪاڻ ته هڪ انساني آپريٽر ڪڏهن ڪڏهن مواد کي ويلڊ ڪرڻ لاءِ تيار ڪندو آهي. روبوٽ ويلڊنگ عام طور تي مزاحمتي جڳهن جي ويلڊنگ ۽ آرڪ ويلڊنگ جي اعلي پيداوار ايپليڪيشنن ۾ استعمال ٿينديون آهن ، جهڙوڪ آٽوميٽڪ انڊسٽري.
روبوٽ ويلڊنگ روبوٽ جي هڪ نسبتا نئين ايپليڪيشن آهي ، جيتوڻيڪ روبوٽ پهريون ڀيرو 1960 جي ڏهاڪي ۾ آمريڪي صنعت ۾ متعارف ڪرايا ويا هئا. ويلڊنگ ۾ روبوٽس جو استعمال 1980 واري ڏهاڪي تائين نه ڇڏيو ، جڏهن آٽو گاڏيون صنعت اسپاٽ ويلڊنگ لاءِ وڏي پئماني تي روبوٽس استعمال ڪرڻ شروع ڪيو. ان کان وٺي ، صنعت ۾ استعمال ٿيندڙ ٻنهي روبوٽس جو تعداد ۽ ان جي درخواستن جو تعداد گهڻو وڌي ويو آهي. 2005 ۾ ، 120،000 کان وڌيڪ روبوٽ اتر آمريڪي صنعت ۾ استعمال ڪيا ويا ، انهن مان تقريبن اڌ ويلڊنگ لاءِ. [1] ترقي بنيادي طور تي تيز سامان جي قيمتن جي ڪري محدود آهي ، ۽ جنهن جي نتيجي ۾ اعليٰ پيداوار واري درخواستن جي پابندي.
روبوٽ آرڪ ويلڊنگ تمام جلدي ترقي ڪرڻ شروع ڪيو آهي ، ۽ اهو پهريان کان 20 سيڪڙو صنعتي روبوٽ ايپليڪيشنز بابت حڪم ڏئي ٿو. آرڪ ويلڊنگ روبوٽس جا اهم حصا ميري ميليٽر يا ميڪيڪل يونٽ ۽ ڪنٽرولر آهن ، جيڪي روبوٽ جي ”دماغ“ طور ڪم ڪن ٿا. هلائيندڙ اهو آهي جيڪو روبوٽ کي حرڪت ڪري ٿو ، ۽ ان نظام جو ڊيزائن ڪيترن ئي عام قسمن ۾ ورهائي سگهجي ٿو ، جهڙوڪ ايس سي آر اي ۽ ڪارٽيزين ڪوآرڊينيٽ روبوٽ ، جيڪي مشين جي هٿن کي سڌو ڪرڻ لاءِ مختلف نقاطي نظام استعمال ڪندا آهن.
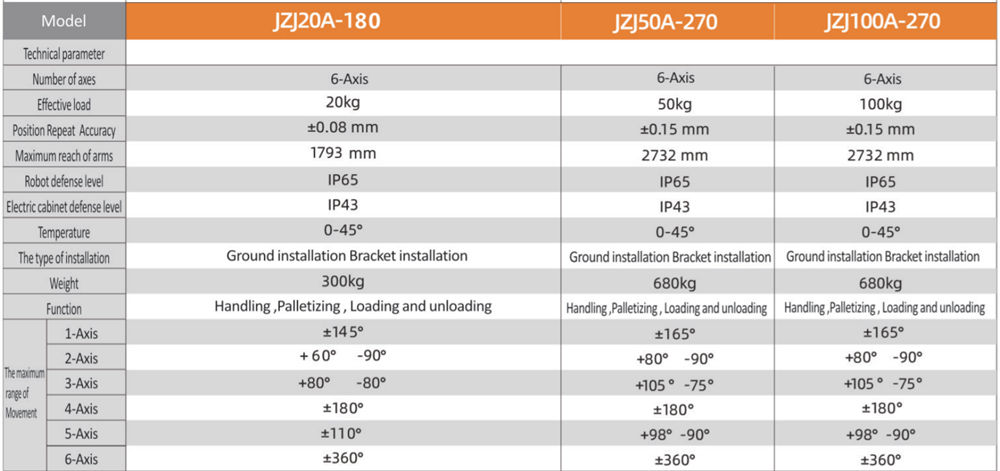
ويلڊنگ روبوٽ سيريز ٽيڪنيڪل سميجو